开源项目HashSmith分享-一次PR经历-SwissTable和Robin Hood的学习
ZealSinger 发布于 阅读:2229 技术文档
记录在reddit上看到一个UU发的贴子,发帖人提到了想写一个优于JDK底层的HashMap的Map,也就是本文要介绍的他所写的,在阅读他的这个项目的过程中,我尝试进行了Fork和PR,虽然只是一个很小的点,并且最终的因为需要权衡性能和内存最终暂且没有合并到主干,但是在这个过程中我也学到了该项目中提到的Hash算法和思路,以及和作者进行了长达两个2h的邮件交流,让我对于学习开源项目又有了新的体验和体会
知识背景
核心灵感:SwissTable和Robin Hood Hashing
SwissTable
简介
提到SwissTable,这个点其实不难,或者说没有想象的那么陌生,可能只是对于像我一样的纯粹的Javaer以及课外知识涉及不足的UU会觉得陌生一点(对知识贫瘠的无赖 ╮(╯_╰)╭ )
SwissTable是Google推出的一种开放寻址的Hash方案,后来被整合到了Abseil,其核心优势在于分离元数据与数据存储以及低成本的探测,关键设计点是如下几个方面
-
元数据与数据分离:将
控制字节和键值对key-value分开存储,利用控制字节实现高效的访问 -
哈希拆分:将哈希值拆分为两个部分h1 和 h2。h1 用于定位探测起始分组,h2 作为指纹存入控制字节。查找时先通过 SIMD 批量比对控制字节中的 h2,仅对匹配项进行真实键比较,大幅减少昂贵的键匹配操作。
-
高负载因子容忍:因为探测过程中成本低,可支持高达87.5%的负载因子,超过传统的哈希表(Java中的HashMap默认负载因子是0.75,0.75已经是比较好的一个因子数了,比0.75小的会导致内存利用率低下,比0.75大的导致冲突频率更高导致效率更低。但是在SwissTable下因为效率更高,能接收更大的负载因子,也就是说能在提高内存利用率的前提下还保持效率不变)
当然,上述只是对于SwissTable设计的特点的简单描述,待会儿下文中我们会进行更加详细的过程介绍
SwissTable其实在提出以后,已经被很多语言的哈希表的底层设计认可,据网络资料获取到
-
Rust语言 1.36.0版本后的标准库
std::collections::HashMap -
Go语言 1.24版本内置引射改为SwissTable设计
从上述资料中可以知道,使用SwissTable无论实在Rust中还是Go语言中,带来的结果都是性能的大幅度提升,由此可见这个Hash方案的优秀之处。
Java为何没有实现
那么如此优秀的Hash方案,为何在Java中却迟迟没有实现和封装呢?我们不考虑历史包袱,那么主要原因是由于语言特性,技术依赖两个方面
-
语言特性:SwissTable 的核心优势依赖 紧凑内存布局 和 底层内存操作灵活性,而 Java 的设计哲学恰好弱化了这两点:
-
对象引用的 “指针开销”:Java 中所有非原生类型的键 / 值都是对象引用(64 位 JVM 下默认 8 字节,压缩 OOP 下 4 字节),键数组本质是 “指针数组”。这会导致内存分散,难以像 C++ 那样将键 / 值紧密打包 —— 而 SwissTable 依赖 “控制字节 + 密集数据存储” 减少缓存未命中,Java 的引用模型天然增加了缓存失效风险。
-
内存布局不可控:Java 由 JVM 管理内存对齐、对象布局(如对象头、填充字节),开发者无法直接控制键 / 值数组的内存排布。SwissTable 要求 “控制字节与数据存储物理隔离但逻辑关联”,Java 缺乏这种底层控制能力,早期难以实现同等效率的布局。
-
-
技术依赖:SwissTable的性能核心是SIMD批量处理,能一次对比多个控制字节,而Java长期缺乏这种可靠的向量计算支持。在Java中实现这一点,要么你使用
Unsafe类相关的不安全的操作去执行JIT相关的操作来实现,要么你就接受循环
破局思路
之前提到,Java中没有能让我们实现批处理这种向量计算支持的方式,但是在Java 16的时候,出现了Vector API用于专门支持向量计算,该项目一直处于孵化阶段,而在Java 24的时候已经算是接近稳定,Java 25进一步进行了优化(其实已经很完善了,但是据说JDK26依旧需要做第十一次孵化),故项目作者bluuewhale尝试基于Vector API实现符合Java的SwissTable,也就设计出了这个项目中的SwissMap 以及 SwissSimdMap
具体实现
我们来简单的来看一下SwissTable(SwissMap 以及 SwissSimdMap本质上的逻辑是差不多的,主要是硬件的适配i上的区别,所以我们不进行重复分析)
先来看看SwissMap中的定义的一些字段信息
private static final byte EMPTY = (byte) 0x80; // 空槽位标记,标识槽位为空可以插入
private static final byte DELETED = (byte) 0xFE; // 删除标记(墓碑),标识槽位已被删除,作为墓碑标记
// 采用分组Hash,将一个元素的Hash分为高位和地位,高位确定所在group
private static final int H1_MASK = 0xFFFFFF80; // 高位选择组
private static final int H2_MASK = 0x0000007F; // 低位存储在控制字节中
private static final int GROUP_SIZE = 8; // SWAR固定为一个组8个槽位(1个字)
// 默认负载因子为0.875,即当元素数量达到容量的87.5%时触发扩容
private static final double DEFAULT_LOAD_FACTOR = 0.875d; // 类似Abseil SwissTable (7/8)
private static final long BITMASK_LSB = 0x0101010101010101L; // 最低有效位掩码 用于广播单个字节到所有字节通道
private static final long BITMASK_MSB = 0x8080808080808080L; // 最高有效位掩码,用于检测每个通道的最高位
private long[] ctrl; // 每个long打包8个控制字节
private Object[] keys; // 键存储
private Object[] vals; // 值存储
private int tombstones; // 已删除槽位数
然后我们看看SwissMap的初始化init()方法
// 入参为默认的大小 16
protected void init(int desiredCapacity) {
// 计算满足期望容量的最小组数
int nGroups = Math.max(1, (desiredCapacity + GROUP_SIZE - 1) / GROUP_SIZE);
// 调整组数为大于等于原值的最小2次幂
nGroups = ceilPow2(nGroups);
// 组数*每组个数得到总容量
this.capacity = nGroups * GROUP_SIZE;
// 相关数组的初始化
this.ctrl = new long[nGroups];
Arrays.fill(this.ctrl, broadcast(EMPTY));
this.keys = new Object[capacity];
this.vals = new Object[capacity];
this.size = 0;
this.tombstones = 0;
// 根据负载因子和容量计算首次扩容阈值
this.maxLoad = calcMaxLoad(this.capacity);
}
然后我们来看看对应的put()方法。先不管reHash的过程
public V put(K key, V value) {
// 是否需要ReHash
maybeRehash();
return putVal(key, value);
}
private V putVal(K key, V value) {
// 计算key对应的h1和h2两个hash值,确定组和指纹
int h = hash(key);
int h1 = h1(h);
byte h2 = h2(h);
int nGroups = numGroups();
int mask = nGroups - 1; // 组索引掩码(替代取模,优化性能)
int firstTombstone = -1; // 记录遍历中遇到的第一个墓碑位置(优先复用)
int visitedGroups = 0; // 已经遍历的组数 防止死循环
int g = h1 & mask; // optimized modulo operation (same as h1 % nGroups) 得到初始组索引
for (;;) {
int base = g * GROUP_SIZE; // 当前组的槽位基索引(组内第一个槽位的全局索引)
long word = loadCtrlWord(g); // 加载当前组的控制字段 ctrl[group] 一个组的size=8位 刚好就是一个long类型 打包成一个long类型是批处理的关键
// 下面属于组内匹配过程 查找是否已经存在该key
long eqMask = eqMask(word, h2); // 生成掩码:组内控制字节=h2的槽位,对应位设为1
while (eqMask != 0) { // 遍历h2相匹配的槽位
int idx = base + nextEmptySlotIndex(eqMask); // 找到掩码中最低位的1 → 对应槽位索引,也就是找到匹配h2最近的那个槽位
if (Objects.equals(keys[idx], key)) { // 比较指纹 如果key相同则覆盖且返回旧的value
V old = (V) vals[idx];
vals[idx] = value;
return old;
}
eqMask &= eqMask - 1; // clear LSB 经典位运算,清除最低位的 1(比如 0b1010 → 0b1000),保证能匹配到下一位,从而实现遍历所有匹配槽位
}
// 记录第一个墓碑的位置
if (firstTombstone < 0) {
long delMask = eqMask(word, DELETED);// 生成掩码:组内控制字节=DELETED的槽位
if (delMask != 0) firstTombstone = base + nextEmptySlotIndex(delMask); // 依旧是筛选出第一个墓碑槽位
}
// 找到下一个空位
long emptyMask = eqMask(word, EMPTY);
if (emptyMask != 0) {
int idx = base + nextEmptySlotIndex(emptyMask);
int target = (firstTombstone >= 0) ? firstTombstone : idx; // 优先复用墓碑 如果没有墓碑再使用第一个空位
return insertAt(target, key, value, h2); // 插入数据 对应的key/value数组的target位置放入数据,并且更新ctrl[target]数组中对应的位置从DELETED/EMPTY修改为h2
}
if (++visitedGroups >= nGroups) { // 递增已经遍历的组的数量 当所有的组数量遍历完了无空槽。实际上这个地方大概率不会触发,因为会有扩容操作的存在,不会出现无空槽的情况,属于防御性编程
throw new IllegalStateException("Probe cycle exhausted; table appears full of tombstones");
}
g = (g + 1) & mask; // 组索引增加,外层for循环就是在遍历所有的组,查找所有的组,只不过是从h1计算得到的索引位置开始遍历
}
}其中比较重要的两个方法就是eqMask(long word, byte b)和nextEmptySlotIndex(long mask),我们可以来分析一下
eqMask
这个 eqMask 方法是 SwissMap 中 SWAR(单指令多数据)批量字节匹配 的核心实现,目标是:接收一个 8 字节的控制字(word,对应 8 个槽位的控制字节)和一个目标字节 b,返回一个 8 位掩码(long 类型,但仅低 8 位有效)—— 掩码的第 i 位为 1,表示控制字中第 i 个字节等于 b;为 0 则不等。
整个过程利用两个前置常量BITMASK_LSB 和 BITMASK_MSB,以及broadcast()方法
private long eqMask(long word, byte b) {
long x = word ^ broadcast(b);
long m = (x - BITMASK_LSB) & ~x & BITMASK_MSB;
return m >>> 7;
}
private long broadcast(byte b) {
// Broadcast a single byte to all 8 byte lanes
return toUnsignedByte(b) * BITMASK_LSB;
}
private static long toUnsignedByte(byte b) {
// Unsigned widening to avoid sign extension on negative bytes
return b & 0xFFL;
}
broadcast方法的作用就是将字节b转化为八进制,然后利用异或(^)特性:两个二进制位相同则为 0,不同则为1,则可以将得到x,x中是每一位上,word和b不一致的就会标记非0,相同则标记为0(0X00)
假设控制字 word = 0x0201020102010000L(8 个字节:00,00,01,02,01,02,01,02),
目标字节 b = 0x02;broadcast(b) = 0x0202020202020202L;
异或后 x = 0x0001000100010202L(字节级:02^02=00, 01^02=01, 02^02=00, 01^02=01, 02^02=00, 01^02=01, 00^02=02, 00^02=02)。
然后经过(x - BITMASK_LSB) & ~x & BITMASK_MSB提取 “匹配字节” 的标记位
子步骤 2.1:x - BITMASK_LSB —— 利用下溢标记 0 字节
BITMASK_LSB = 0x0101010101010101L,对 x 每个字节位独立减 1:
若 x 的第 i 个字节是 0x00 → 减 1 后下溢(0-1=-1),该字节变为 0xFF(二进制 11111111),其最高位(第 7 位)为 1;
若 x 的第 i 个字节非 0 → 减 1 后最高位仍为 0(如 0x01-1=0x00、0x02-1=0x01,最高位都是 0)。
示例续:x = 0x0001000100010202L - 0x0101010101010101L = 0xFF00FF00FF000101L;(字节级:00-01=FF, 01-01=00, 00-01=FF, 01-01=00, 00-01=FF, 01-01=00, 02-01=01, 02-01=01)。
子步骤 2.2:& ~x —— 过滤非 0 字节的干扰
~x 是 x 的按位取反(字节级取反):
若 x 的第 i 个字节是 0x00 → ~x 该字节为 0xFF → 与运算后保留子步骤 2.1 的结果;
若 x 的第 i 个字节非 0 → ~x 该字节非 0xFF → 与运算后清除子步骤 2.1 中可能的无效位。
示例续:~x = 0xFFFEFFFEFFFEFDFDL;0xFF00FF00FF000101L & 0xFFFEFFFEFFFEFDFDL = 0xFF00FF00FF000000L;(仅保留 x 中 0 字节对应的下溢位,其余清零)。
子步骤 2.3:& BITMASK_MSB —— 仅保留最高位标记
BITMASK_MSB = 0x8080808080808080L,作用是只保留每个字节的最高位,其余位清 0 —— 最终 m 中,只有 x 里值为 0 的字节(匹配 b 的字节),其最高位为 1,其余为 0。
示例续:0xFF00FF00FF000000L & 0x8080808080808080L = 0x8000800080000000L;(仅保留 3 个匹配字节的最高位 1,其余为 0)。
最后将m右移七位,把 8 字节的标记(m)压缩为 8 位掩码(long 的低 8 位),掩码的第 i 位对应控制字的第 i 个字节是否匹配 b
右移 7 位的唯一目的,是把这些标记挪到 8 的倍数位,方便进行高效的运算
m = 0x8000800080000000L >>> 7 = 0x0100010001000000L;
二进制串(左→右):00000001 00000000 00000001 00000000 00000001 00000000 00000000 00000000
对应全局位索引: 63~56 55~48 47~40 39~32 31~24 23~16 15~8 7~0
每8位一个槽位 右移之后为3,5,7,那么原来的就是2,4,6槽位
nextEmptySlotIndex
然后是nextEmptySlotIndex()方法
private int nextEmptySlotIndex(long mask) {
return (int) (Long.numberOfTrailingZeros(mask) >>> 3);
}
这个 nextEmptySlotIndex 方法是 SwissMap 中 “8 位间隔掩码”→“组内槽位索引” 的核心转换工具,专门适配 eqMask 返回的掩码格式,最终输出组内 0~7 的槽位索引(因为 SwissMap 每个 Group 固定 8 个槽位)
用上面的0x0100010001000000L放到方法中测试一下
十六进制:0x0100010001000000L
64位二进制(左→右对应全局位63~0):
00000001 00000000 00000001 00000000 00000001 00000000 00000000 00000000
全局位索引范围:63~56 55~48 47~40 39~32 31~24 23~16 15~8 7~0
numberOfTrailingZeros查找最低位开始最长连续的0的个数(也可以理解找最低位的1)那么也就是24位
>>>3 其实就是除以 2^3 也就是除以8 那么得的就是3,也就对应3号槽位,和上面eqMask方法对应的上
实际存储
说了这么多理论,我们可以从宏观角度来看看整个数据的存储如何进行的
我们定义两个测试键:
-
KeyA:hash=100 → 理想位置 = 100 & 15 = 4 -
KeyB:hash=100 → 理想位置 = 4(冲突) -
KeyC:hash=101 → 理想位置 = 101 & 15 = 5
步骤 1:初始化
控制字节数组全为 EMPTY(0x00),键 / 值数组为空:
| 索引 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | ... | 15 |
|---|---|---|---|---|---|---|---|---|---|
| Control | 00 | 00 | 00 | 00 | 00 | 00 | 00 | ... | 00 |
| Keys | - | - | - | - | - | - | - | ... | - |
| Values | - | - | - | - | - | - | - | ... | - |
步骤 2:插入 KeyA(值 = 10)
-
计算理想位置 = 4,读取控制字节 [4] →
EMPTY; -
将 Control [4] 标记为
OCCUPIED(0x01); -
Keys[4] = KeyA,Values[4] = 10;
此时状态:
| 索引 | 4 | 5 | 6 |
|---|---|---|---|
| Control | 01 | 00 | 00 |
| Keys | A | - | - |
| Values | 10 | - | - |
步骤 3:插入 KeyB(值 = 20,哈希冲突)
-
计算理想位置 = 4,读取 Control [4] →
OCCUPIED(冲突); -
SWAR 批量探测:一次读取 Control [4~11](8 个字节),快速过滤出第一个
EMPTY槽位(索引 5);这个读取过程也符合我们之前分析代码,从理想位置的索引位置开始往后遍历所有的槽 -
将 Control [5] 标记为
OCCUPIED(0x01); -
Keys[5] = KeyB,Values[5] = 20;
此时状态:
| 索引 | 4 | 5 | 6 |
|---|---|---|---|
| Control | 01 | 01 | 00 |
| Keys | A | B | - |
| Values | 10 | 20 | - |
步骤 4:查询 KeyB
-
计算理想位置 = 4,通过 SWAR 批量读取 Control [4~11],快速筛选出所有
OCCUPIED槽位(索引 4、5); -
仅对比这两个槽位的键:Keys [4]=A(不匹配)→ Keys [5]=B(匹配);
-
返回 Values [5]=20;
对比 HashMap:无需遍历链表,批量过滤后仅需对比少量候选槽位,效率更高。
步骤 5:删除 KeyA(触发墓碑机制)
SwissMap 不直接清空槽位,而是标记「墓碑」,这是其核心设计:
-
定位 KeyA 所在索引 4,将 Control [4] 从
OCCUPIED(01)改为TOMBSTONE(02); -
保留 Keys [4] 和 Values [4](可置空,不影响,核心是控制字节标记);
此时状态(关键:索引 4 是墓碑):
| 索引 | 4 | 5 | 6 |
|---|---|---|---|
| Control | 02 | 01 | 00 |
| Keys | A | B | - |
| Values | 10 | 20 | - |
步骤 6:复用墓碑(插入 KeyD,值 = 40,hash=100)
墓碑的核心价值是「复用空位,避免探测链断裂」:
-
计算理想位置 = 4,读取 Control [4] →
TOMBSTONE(可复用); -
将 Control [4] 从
TOMBSTONE(02)改回OCCUPIED(01); -
覆盖 Keys [4]=D,Values [4]=40;
此时状态(墓碑被复用):
| 索引 | 4 | 5 | 6 |
|---|---|---|---|
| Control | 01 | 01 | 00 |
| Keys | D | B | - |
| Values | 40 | 20 | - |
SwissTable实际上就是开发地址法,开放地址法的致命问题是「删除槽位会断裂探测链」:
若直接清空索引 4(设为 EMPTY),查询 KeyB 时,会导致先查到这个empty所在index,从而导致equal中无法相等,然后直接跳过当前槽;(具体可以看源码中的findValue方法)
标记为墓碑后,查询时会跳过墓碑继续探测,插入时可复用墓碑,既保证探测链连续,又避免空位浪费。
RobinHoodMap
除了上述的SwissMap,作者还实现了一个采用 Robin Hood 哈希,冲突时通过「移动元素」平衡探测距离(元素的探测距离越接近其理想位置越好),避免长探测链。
从了解到,C++ 13中的robin_hood::unordered_map就是传统std::unordered_map的替代品,性能提高了2-3倍
因为不是本次的重点,所以这个Hash方式我们简单的用实际操作,不去分析源码设计了。
RobinHood 哈希中需要弄明白如下公式以及公式中变量的关系:探测距离 = (实际位置 - 理想位置) % 哈希表容量
RobinHood 哈希的核心逻辑是 “劫富济贫” 式的位置交换 :当插入新元素时,若遇到一个 “探测距离比自己大” 的已存元素(更委屈的元素),就交换两者的位置 —— 最终让这个 “委屈” 的元素(大探测距离)向它自己的理想位置靠近,而非向 “别人的理想位置” 靠近。
我们设定:
-
哈希表容量:8(索引 0~7,2 的幂,方便取模);
-
哈希函数:理想位置 = hash (key) % 8(简化为直接给每个 Key 的理想位置,聚焦插入逻辑);
-
探测策略:线性探测(插入时理想位置被占,依次往后找空位置,即
位置+1 % 8); -
探测距离定义:
d = (实际位置 - 理想位置) % 8(非负,0 表示元素在自己的理想位置,越大越 “委屈”); -
插入的 Key 列表
(均哈希冲突,理想位置都是 4):
-
KeyA:理想位置 4
-
KeyB:理想位置 4
-
KeyC:理想位置 4
-
KeyD:理想位置 4
-
二、先看「普通线性探测」的插入(暴露问题)
普通线性探测的逻辑:理想位置被占,就一直往后找空位置,不交换任何元素,最终导致后插入的元素被 “挤到远处”。
| 插入步骤 | 操作 | 实际位置 | 探测距离 d | 哈希表状态(索引 0-7) |
|---|---|---|---|---|
| 1. 插入 KeyA | 理想位置 4 为空,直接放入 | 4 | 0 | [空,空,空,空,A, 空,空,空] |
| 2. 插入 KeyB | 理想位置 4 被占,探测 5(空),放入 | 5 | 1 | [空,空,空,空,A,B, 空,空] |
| 3. 插入 KeyC | 理想位置 4、5 被占,探测 6(空),放入 | 6 | 2 | [空,空,空,空,A,B,C, 空] |
| 4. 插入 KeyD | 理想位置 4、5、6 被占,探测 7(空),放入 | 7 | 3 | [空,空,空,空,A,B,C,D] |
普通线性探测的问题:
-
KeyD 的探测距离 = 3(最委屈),被挤到离自己理想位置 4 最远的 7 号位;
-
各元素探测距离差异大(0、1、2、3),查询 KeyD 时需要遍历 4→5→6→7,效率低。
三、再看「RobinHood 哈希」的插入(核心是 “交换 + 劫富济贫”)
RobinHood 的核心规则:
-
插入新元素时,先按线性探测找空位置,计算自己的探测距离
d_new; -
若探测路径上遇到已存在的元素,计算其探测距离
d_old; -
若
d_new > d_old(已存元素更 “委屈”),则交换两者位置
-
原已存元素(更委屈)移动到新元素的当前探测位置(离自己的理想位置更近,d 变小);
-
新元素接管原已存元素的位置,继续往后探测;
-
-
重复步骤 2-3,直到找到空位置插入。
分步拆解 RobinHood 插入 KeyA→KeyB→KeyC→KeyD 的全过程
所有 Key 的理想位置均为 4,按顺序插入,每一步都标注「探测位置、d 计算、是否交换、最终状态」。
步骤 1:插入 KeyA(无冲突,无交换)
-
计算 KeyA 的理想位置:4;
-
探测位置 4:为空,直接放入;
-
计算 KeyA 的 d:
d = 4 - 4 = 0(无委屈,在自己理想位置); -
哈希表状态(索引 0~7):
[空, 空, 空, 空, A, 空, 空, 空]。
步骤 2:插入 KeyB(无冲突,无交换)
-
计算 KeyB 的理想位置:4;
-
探测位置 4:被 KeyA 占据,继续探测下一个位置 5;
-
探测位置 5:为空,计算 KeyB 若放入 5 的 d_new:
d_new = 5 - 4 = 1; -
位置 5 无已存元素,直接放入;
-
计算 KeyB 的 d:
d = 1; -
哈希表状态:
[空, 空, 空, 空, A, B, 空, 空]。
步骤 3:插入 KeyC(无交换,仅线性探测)
-
计算 KeyC 的理想位置:4;
-
探测位置 4:被 A 占据(A 的 d_old=0),KeyC 若放 4 的 d_new=0 → d_new(0)=d_old(0)→ 不交换,继续探测位置 5;
-
探测位置 5:被 B 占据(B 的 d_old=1),KeyC 若放 5 的 d_new=1 → d_new(1)=d_old(1)→ 不交换,继续探测位置 6;
-
探测位置 6:为空,计算 KeyC 若放入 6 的 d_new:
d_new = 6 - 4 = 2; -
位置 6 无已存元素,直接放入;
-
计算 KeyC 的 d:
d = 2; -
哈希表状态:
[空, 空, 空, 空, A, B, C, 空]。
步骤 4:插入 KeyD(核心交换场景,重点!)
这是体现 RobinHood 核心逻辑的关键步骤,逐阶段拆解探测和交换过程:
-
计算 KeyD 的理想位置:4;
-
阶段 1:探测位置 4(被 A 占据)
-
KeyD 若放 4 的 d_new:
4-4=0; -
已存元素 A 的 d_old=0 → d_new(0)=d_old(0)→ 不交换,继续探测位置 5;
-
-
阶段 2:探测位置 5(被 B 占据)
-
KeyD 若放 5 的 d_new:
5-4=1; -
已存元素 B 的 d_old=1 → d_new(1)=d_old(1)→ 不交换,继续探测位置 6;
-
-
阶段 3:探测位置 6(被 C 占据)
-
KeyD 若放 6 的 d_new:
6-4=2; -
已存元素 C 的 d_old=2 → d_new(2)=d_old(2)→ 不交换,继续探测位置 7;
-
-
阶段 4:探测位置 7(为空,触发交换判断)
-
KeyD 若放 7 的 d_new:
7-4=3; -
此时回头看 “最后一个被占据的位置 6(C)”:C 的 d_old=2;
-
对比:d_new(3)> d_old(2)→ 满足交换规则(KeyD 更委屈),触发交换;
-
-
阶段 5:执行交换(KeyC ↔ KeyD)
-
交换逻辑:KeyD(更委屈)有权占据离理想位置更近的 6 号位,KeyC 替 KeyD 承担 7 号位;
-
交换后:
KeyD 移到 6 号位,d=6-4=2(从原本的 3→2,离理想位置 4 更近);
KeyC 移到 7 号位,d=7-4=3(从原本的 2→3,替 D 承担委屈);
-
-
最终状态
-
KeyD 的实际位置:6,d=2;
-
KeyC 的实际位置:7,d=3;
-
哈希表状态:
[空, 空, 空, 空, A, B, D, C]。
-
三、插入完成后:核心数据对比(体现 RobinHood 的价值)
| 元素 | 实际位置 | 探测距离 d | 离理想位置 4 的距离 | 核心变化(对比 “不交换的普通线性探测”) |
|---|---|---|---|---|
| A | 4 | 0 | 0(最近) | 无变化 |
| B | 5 | 1 | 1 | 无变化 |
| D | 6 | 2 | 2 | 普通探测中 D 会在 7 号位(d=3),交换后 d=2,离理想位置更近 |
| C | 7 | 3 | 3(最远) | 普通探测中 C 会在 6 号位(d=2),交换后替 D 承担更大的 d |
更加详细的可以看
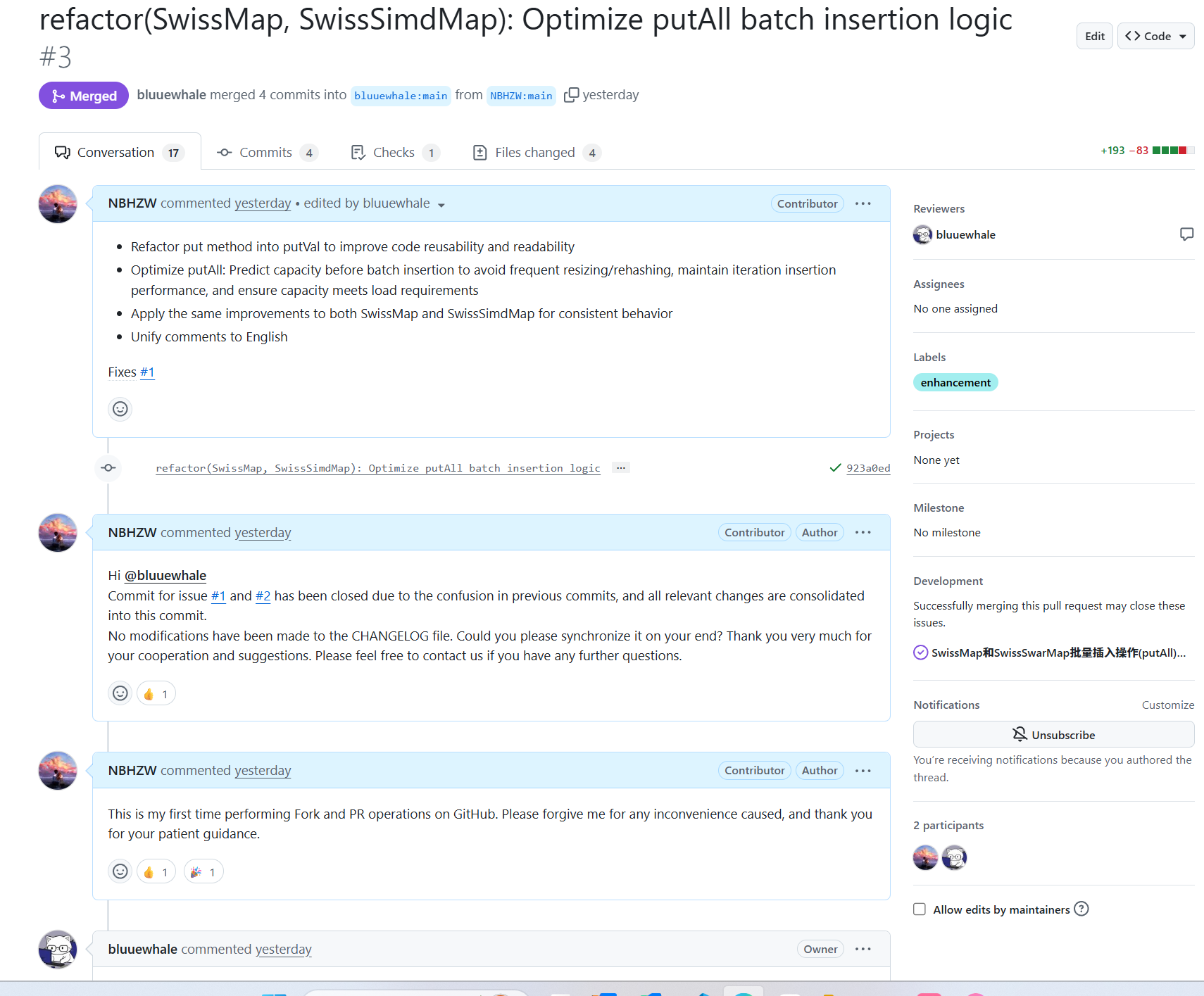
PR过程
整个PR过程其实比较简陋,其实就是修改了SwissMap的putAll方法,整个putAll方法中原本的逻辑是直接循环调用put方法,很明显啊,这个过程可能会导致put中的ReHash循环的被执行,从而导致过于频繁的扩容。
为了提高效率,我将其修改为先通过size预估出要扩容的大小,先进行整体的扩容然后再执行放入,这样就能很好的防止频繁的扩容操作。
但是其实这里也出现了另外一个问题,如果批量新增的这个map和已经存在map中重复数据比较多,就会导致无意义的额外扩容,这个其实在JDK 的 HashMap的putAll方法的源码中一样存在这种问题。这个其实就是一个时间和空间之间的取舍问题。
经过和作者交流,虽然我们两最后还是没有拍板确认最终方案,但是讨论出了更加合理的扩容阈值计算,以及对于后续的探讨确认。
文章标题:开源项目HashSmith分享-一次PR经历-SwissTable和Robin Hood的学习
文章链接:http://8.154.40.120:24180/?post=46
本站所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议,转载请注明来自ZealSinger !
如果觉得文章对您有用,请随意打赏。
您的支持是我们继续创作的动力!

微信扫一扫

支付宝扫一扫